CNN Image Classification Project (CIFAR-10)
End-to-end deep learning pipeline with data augmentation and a small UI demo.
What you’ll do
- Load CIFAR-10 and explore sample images
- Build train/val/test splits with data augmentations
- Train a CNN with PyTorch (cross-entropy, Adam)
- Evaluate with accuracy & confusion matrix; inspect misclassifications
- Wrap the trained model in a small Gradio UI for interactive predictions
This project mirrors a standard vision pipeline used in deep RL encoders.
0. Imports & Device
Code:
import os
import numpy as np
import matplotlib.pyplot as plt
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.utils.data import DataLoader, random_split
import torchvision
import torchvision.transforms as T
from sklearn.metrics import confusion_matrix, ConfusionMatrixDisplay, classification_report
from PIL import Image
import gradio as gr
plt.style.use("ggplot")
device = torch.device("mps" if torch.backends.mps.is_available() else "cuda" if torch.cuda.is_available() else "cpu")
print("Using device:", device)
Output:
Using device: mps
1. Load CIFAR-10 & Define Transforms (with Augmentations)
We use:
- RandomCrop + padding → small translations / zoom
- RandomHorizontalFlip → left/right invariance
- ColorJitter + small Rotation → robustness to lighting and orientation
- Normalization with CIFAR-10 stats
Code:
DATA_ROOT = "./data"
# Data augmentations (training)
train_transform = T.Compose([
T.RandomCrop(32, padding=4),
T.RandomHorizontalFlip(p=0.5),
T.ColorJitter(brightness=0.2, contrast=0.2, saturation=0.2),
T.RandomRotation(degrees=10),
T.ToTensor(),
T.Normalize(mean=(0.4914, 0.4822, 0.4465),
std=(0.2023, 0.1994, 0.2010)),
])
# Deterministic transforms (validation / test / inference)
test_transform = T.Compose([
T.ToTensor(),
T.Normalize(mean=(0.4914, 0.4822, 0.4465),
std=(0.2023, 0.1994, 0.2010)),
])
# For the UI we'll reuse this as inference pipeline
inference_transform = test_transform
# Download CIFAR-10
full_train = torchvision.datasets.CIFAR10(
root=DATA_ROOT, train=True, download=True, transform=train_transform
)
test_ds = torchvision.datasets.CIFAR10(
root=DATA_ROOT, train=False, download=True, transform=test_transform
)
class_names = full_train.classes
print("Classes:", class_names)
print("Train size:", len(full_train), "Test size:", len(test_ds))
Output:
Files already downloaded and verified
Files already downloaded and verified
Classes: ['airplane', 'automobile', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck']
Train size: 50000 Test size: 10000
2. Train / Validation Split & DataLoaders
Code:
# Split train into (train, val)
train_size = int(0.9 * len(full_train))
val_size = len(full_train) - train_size
train_ds, val_ds = random_split(
full_train, [train_size, val_size],
generator=torch.Generator().manual_seed(42)
)
batch_size = 128
train_loader = DataLoader(train_ds, batch_size=batch_size, shuffle=True, num_workers=2, pin_memory=True)
val_loader = DataLoader(val_ds, batch_size=batch_size, shuffle=False, num_workers=2, pin_memory=True)
test_loader = DataLoader(test_ds, batch_size=batch_size, shuffle=False, num_workers=2, pin_memory=True)
print(f"Train batches: {len(train_loader)}, Val batches: {len(val_loader)}, Test batches: {len(test_loader)}")
Output:
Train batches: 352, Val batches: 40, Test batches: 79
3. Utility: Unnormalize & Visualize Samples / Augmentations
Code:
# Helper to unnormalize images for plotting
inv_mean = np.array([0.4914, 0.4822, 0.4465])
inv_std = np.array([0.2023, 0.1994, 0.2010])
def unnormalize(t):
"""
t: (C,H,W) tensor normalized with CIFAR10 stats
returns: (H,W,C) numpy image in [0,1]
"""
img = t.detach().cpu().numpy().transpose(1, 2, 0)
img = img * inv_std + inv_mean
img = np.clip(img, 0.0, 1.0)
return img
# Show a grid of random train images
imgs, labels = next(iter(train_loader))
imgs, labels = imgs[:16], labels[:16]
fig, axes = plt.subplots(4, 4, figsize=(6, 6))
axes = axes.ravel()
for i, ax in enumerate(axes):
ax.imshow(unnormalize(imgs[i]))
ax.set_title(class_names[labels[i].item()], fontsize=8)
ax.axis("off")
plt.suptitle("Random training samples (with augmentations)", y=0.92)
plt.tight_layout()
plt.show()
Visualize augmentations of a single raw image
Code:
# Reload a raw (untransformed) dataset to show augmentations clearly
raw_train = torchvision.datasets.CIFAR10(root=DATA_ROOT, train=True, download=False, transform=None)
raw_img, raw_label = raw_train[0]
augmented = [train_transform(raw_img) for _ in range(8)]
fig, axes = plt.subplots(2, 4, figsize=(7, 4))
axes = axes.ravel()
for i, ax in enumerate(axes):
ax.imshow(unnormalize(augmented[i]))
ax.axis("off")
fig.suptitle(f"Augmentations of: {class_names[raw_label]}", y=1.02)
plt.tight_layout()
plt.show()
4. Define a CNN Model
A small but decent CIFAR-10 CNN:
- 3× Conv-BN-ReLU blocks with MaxPool
- 2× Fully connected layers
- Softmax via
CrossEntropyLoss
Code:
class SmallCifarCNN(nn.Module):
def __init__(self, num_classes: int = 10):
super().__init__()
self.features = nn.Sequential(
# Block 1
nn.Conv2d(3, 32, kernel_size=3, padding=1),
nn.BatchNorm2d(32),
nn.ReLU(inplace=True),
nn.MaxPool2d(2), # 32 -> 16
# Block 2
nn.Conv2d(32, 64, kernel_size=3, padding=1),
nn.BatchNorm2d(64),
nn.ReLU(inplace=True),
nn.MaxPool2d(2), # 16 -> 8
# Block 3
nn.Conv2d(64, 128, kernel_size=3, padding=1),
nn.BatchNorm2d(128),
nn.ReLU(inplace=True),
nn.MaxPool2d(2), # 8 -> 4
)
self.classifier = nn.Sequential(
nn.Flatten(),
nn.Linear(128 * 4 * 4, 256),
nn.ReLU(inplace=True),
nn.Dropout(p=0.5),
nn.Linear(256, num_classes),
)
def forward(self, x):
x = self.features(x)
x = self.classifier(x)
return x
model = SmallCifarCNN(num_classes=len(class_names)).to(device)
print(model)
Output:
SmallCifarCNN(
(features): Sequential(
(0): Conv2d(3, 32, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(1): BatchNorm2d(32, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(2): ReLU(inplace=True)
(3): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(4): Conv2d(32, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(5): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(6): ReLU(inplace=True)
(7): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
(8): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1))
(9): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(10): ReLU(inplace=True)
(11): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False)
)
(classifier): Sequential(
(0): Flatten(start_dim=1, end_dim=-1)
(1): Linear(in_features=2048, out_features=256, bias=True)
(2): ReLU(inplace=True)
(3): Dropout(p=0.5, inplace=False)
(4): Linear(in_features=256, out_features=10, bias=True)
)
)
5. Training & Validation Loop
We train with:
- Loss: CrossEntropyLoss
- Optimizer: Adam
- Metric: accuracy on train & val
We keep track of the best validation accuracy and save that model.
Code:
def accuracy_from_logits(logits, targets):
preds = logits.argmax(dim=1)
correct = (preds == targets).sum().item()
return correct / targets.size(0)
def train_one_epoch(model, loader, optimizer, criterion):
model.train()
total_loss, total_acc, total_n = 0.0, 0.0, 0
for xb, yb in loader:
xb, yb = xb.to(device), yb.to(device)
optimizer.zero_grad()
logits = model(xb)
loss = criterion(logits, yb)
loss.backward()
optimizer.step()
batch_size = yb.size(0)
total_loss += loss.item() * batch_size
total_acc += accuracy_from_logits(logits, yb) * batch_size
total_n += batch_size
return total_loss / total_n, total_acc / total_n
def eval_one_epoch(model, loader, criterion):
model.eval()
total_loss, total_acc, total_n = 0.0, 0.0, 0
with torch.no_grad():
for xb, yb in loader:
xb, yb = xb.to(device), yb.to(device)
logits = model(xb)
loss = criterion(logits, yb)
batch_size = yb.size(0)
total_loss += loss.item() * batch_size
total_acc += accuracy_from_logits(logits, yb) * batch_size
total_n += batch_size
return total_loss / total_n, total_acc / total_n
criterion = nn.CrossEntropyLoss()
optimizer = torch.optim.Adam(model.parameters(), lr=1e-3, weight_decay=1e-4)
num_epochs = 20
best_val_acc = 0.0
train_hist, val_hist = [], []
os.makedirs("checkpoints", exist_ok=True)
best_ckpt_path = "checkpoints/cifar_cnn_best.pt"
for epoch in range(1, num_epochs + 1):
train_loss, train_acc = train_one_epoch(model, train_loader, optimizer, criterion)
val_loss, val_acc = eval_one_epoch(model, val_loader, criterion)
train_hist.append((train_loss, train_acc))
val_hist.append((val_loss, val_acc))
if val_acc > best_val_acc:
best_val_acc = val_acc
torch.save(model.state_dict(), best_ckpt_path)
print(
f"Epoch {epoch:02d} | "
f"Train loss={train_loss:.4f}, acc={train_acc:.4f} | "
f"Val loss={val_loss:.4f}, acc={val_acc:.4f}"
)
print("Best val acc:", best_val_acc)
Output:
Epoch 01 | Train loss=1.6629, acc=0.3871 | Val loss=1.4963, acc=0.4526
Epoch 02 | Train loss=1.3893, acc=0.4935 | Val loss=1.2387, acc=0.5516
Epoch 03 | Train loss=1.2678, acc=0.5438 | Val loss=1.1621, acc=0.5830
Epoch 04 | Train loss=1.1821, acc=0.5756 | Val loss=1.1060, acc=0.6110
Epoch 05 | Train loss=1.1232, acc=0.6065 | Val loss=1.0350, acc=0.6310
Epoch 06 | Train loss=1.0782, acc=0.6208 | Val loss=0.9513, acc=0.6622
Epoch 07 | Train loss=1.0326, acc=0.6386 | Val loss=0.9082, acc=0.6826
Epoch 08 | Train loss=1.0002, acc=0.6502 | Val loss=0.8699, acc=0.6874
Epoch 09 | Train loss=0.9723, acc=0.6608 | Val loss=0.8507, acc=0.6948
Epoch 10 | Train loss=0.9513, acc=0.6683 | Val loss=0.8321, acc=0.7114
Epoch 11 | Train loss=0.9237, acc=0.6777 | Val loss=0.8082, acc=0.7132
Epoch 12 | Train loss=0.9072, acc=0.6838 | Val loss=0.8139, acc=0.7078
Epoch 13 | Train loss=0.8849, acc=0.6916 | Val loss=0.8010, acc=0.7150
Epoch 14 | Train loss=0.8661, acc=0.6969 | Val loss=0.7929, acc=0.7186
Epoch 15 | Train loss=0.8555, acc=0.7058 | Val loss=0.7635, acc=0.7296
Epoch 16 | Train loss=0.8376, acc=0.7114 | Val loss=0.7619, acc=0.7308
Epoch 17 | Train loss=0.8268, acc=0.7146 | Val loss=0.7778, acc=0.7298
Epoch 18 | Train loss=0.8121, acc=0.7197 | Val loss=0.7688, acc=0.7206
Epoch 19 | Train loss=0.8011, acc=0.7247 | Val loss=0.7302, acc=0.7376
Epoch 20 | Train loss=0.7816, acc=0.7336 | Val loss=0.7358, acc=0.7418
Best val acc: 0.7418
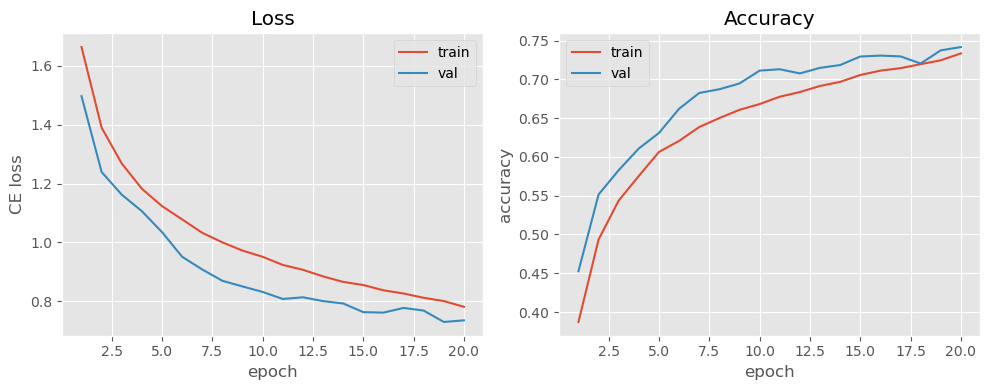
Plot training / validation curves
Code:
train_loss_arr = np.array([t[0] for t in train_hist])
train_acc_arr = np.array([t[1] for t in train_hist])
val_loss_arr = np.array([v[0] for v in val_hist])
val_acc_arr = np.array([v[1] for v in val_hist])
epochs = np.arange(1, num_epochs + 1)
fig, ax = plt.subplots(1, 2, figsize=(10, 4))
ax[0].plot(epochs, train_loss_arr, label="train")
ax[0].plot(epochs, val_loss_arr, label="val")
ax[0].set_title("Loss")
ax[0].set_xlabel("epoch")
ax[0].set_ylabel("CE loss")
ax[0].legend()
ax[1].plot(epochs, train_acc_arr, label="train")
ax[1].plot(epochs, val_acc_arr, label="val")
ax[1].set_title("Accuracy")
ax[1].set_xlabel("epoch")
ax[1].set_ylabel("accuracy")
ax[1].legend()
plt.tight_layout()
plt.show()
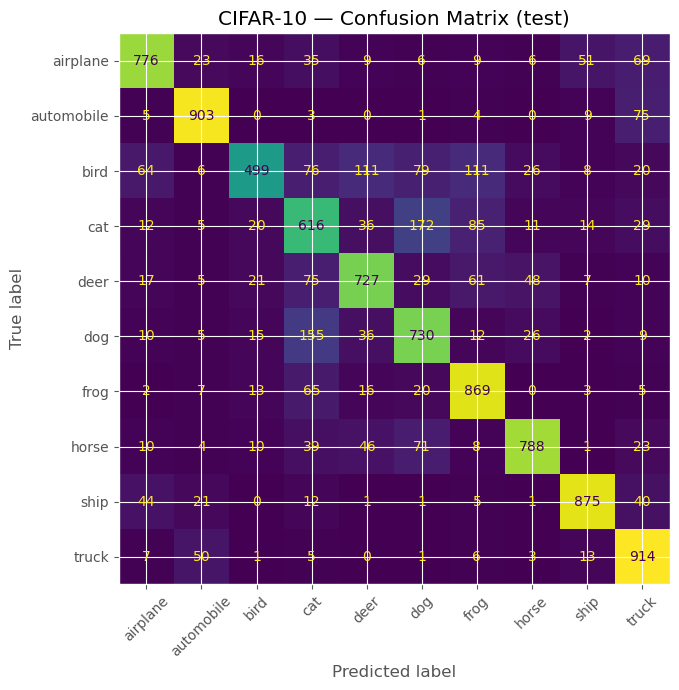
6. Test Evaluation & Error Analysis
Code:
# Load best model before testing
best_model = SmallCifarCNN(num_classes=len(class_names)).to(device)
best_model.load_state_dict(torch.load(best_ckpt_path, map_location=device))
best_model.eval()
all_preds, all_targets = [], []
with torch.no_grad():
for xb, yb in test_loader:
xb, yb = xb.to(device), yb.to(device)
logits = best_model(xb)
preds = logits.argmax(dim=1)
all_preds.append(preds.cpu().numpy())
all_targets.append(yb.cpu().numpy())
all_preds = np.concatenate(all_preds)
all_targets = np.concatenate(all_targets)
test_acc = (all_preds == all_targets).mean()
print("Test accuracy:", round(test_acc, 4))
Output:
Test accuracy: 0.7697
Code:
# Confusion matrix
cm = confusion_matrix(all_targets, all_preds)
disp = ConfusionMatrixDisplay(confusion_matrix=cm, display_labels=class_names)
fig, ax = plt.subplots(figsize=(7, 7))
disp.plot(ax=ax, xticks_rotation=45, colorbar=False)
plt.title("CIFAR-10 — Confusion Matrix (test)")
plt.tight_layout()
plt.show()
Code:
# Classification report
print(classification_report(all_targets, all_preds, target_names=class_names))
Output:
precision recall f1-score support
airplane 0.82 0.78 0.80 1000
automobile 0.88 0.90 0.89 1000
bird 0.84 0.50 0.63 1000
cat 0.57 0.62 0.59 1000
deer 0.74 0.73 0.73 1000
dog 0.66 0.73 0.69 1000
frog 0.74 0.87 0.80 1000
horse 0.87 0.79 0.83 1000
ship 0.89 0.88 0.88 1000
truck 0.77 0.91 0.83 1000
accuracy 0.77 10000
macro avg 0.78 0.77 0.77 10000
weighted avg 0.78 0.77 0.77 10000
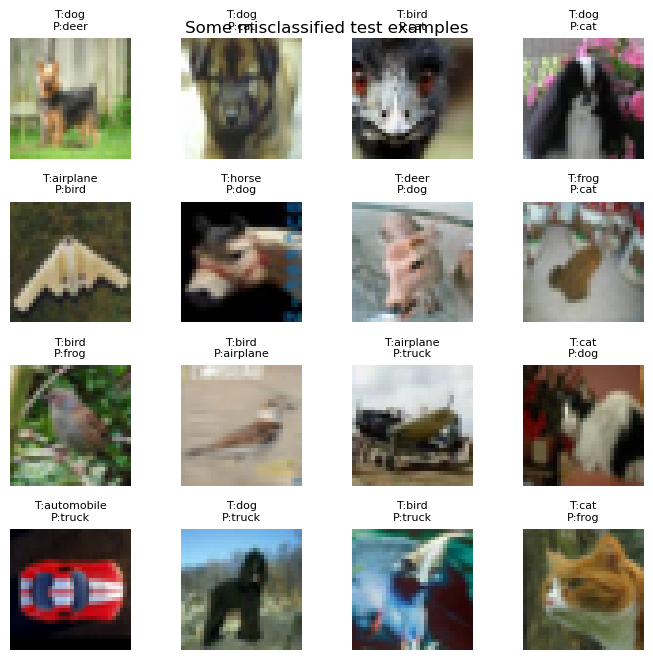
Code:
# Visualize some misclassified examples
wrong_idx = np.where(all_preds != all_targets)[0]
print("Total misclassified:", len(wrong_idx))
# grab up to 16
wrong_idx = wrong_idx[:16]
# reconstruct images (need to pull from test_ds, which has transform)
fig, axes = plt.subplots(4, 4, figsize=(7, 7))
axes = axes.ravel()
for ax, idx in zip(axes, wrong_idx):
img_t, true_label = test_ds[idx]
ax.imshow(unnormalize(img_t))
ax.set_title(f"T:{class_names[true_label]}\nP:{class_names[all_preds[idx]]}", fontsize=8)
ax.axis("off")
plt.suptitle("Some misclassified test examples", y=0.92)
plt.tight_layout()
plt.show()
Output:
Total misclassified: 2303
7. “Deployment” — Gradio UI Interface
We now wrap the best model in a tiny web UI using Gradio:
- Upload an image (any RGB)
- We resize & normalize it like CIFAR-10
- Show top-3 class probabilities
Code:
# Define a model for deployment (reuse best_model)
deployed_model = best_model
deployed_model.eval()
def predict_cifar_image(img: Image.Image):
"""
Gradio callback:
- Takes a PIL Image
- Resizes to 32x32 (CIFAR size)
- Normalizes and runs through the CNN
- Returns top-3 class probabilities
"""
img = img.convert("RGB")
img = img.resize((32, 32), Image.BILINEAR)
x = inference_transform(img).unsqueeze(0).to(device)
with torch.no_grad():
logits = deployed_model(x)
probs = F.softmax(logits, dim=1).cpu().numpy().ravel()
topk = 3
idxs = np.argsort(-probs)[:topk]
return {class_names[i]: float(probs[i]) for i in idxs}
demo = gr.Interface(
fn=predict_cifar_image,
inputs=gr.Image(type="pil", label="Upload an RGB image (will be resized to 32×32)"),
outputs=gr.Label(num_top_classes=3, label="Top-3 CIFAR-10 predictions"),
title="CIFAR-10 CNN Classifier",
description="Small CNN trained on CIFAR-10. Upload an image and see top-3 class probabilities.",
)
demo.launch(share=False)
Output:
* Running on local URL: http://127.0.0.1:7860
* To create a public link, set `share=True` in `launch()`.
NOTE: The Gradio link has been updated to the Hugging Face Space link to ensure the reproducibility of the model trained in this tutorial.
Project Summary & Next Steps
- Built a full CIFAR-10 CNN pipeline: data → model → training → evaluation → Deployment.
- Used data augmentation to improve generalization and robustness.
- Performed thorough evaluation via accuracy, confusion matrix, and misclassification analysis.
- Wrapped the trained model in a Gradio interface for lightweight interactive deployment.
Next: Proceed to
Phase 1 — Fundamentals, covering MDPs, Bellman Equations, Dynamic Programming, Monte Carlo, and TD Learning, which form the theoretical backbone of modern Reinforcement Learning.