Dynamic Programming: Policy Evaluation
Computing $v^\pi$ exactly from a known MDP model.
What you’ll learn
- How to evaluate a fixed policy using the Bellman expectation equation
- The iterative policy evaluation algorithm (Dynamic Programming)
- Synchronous vs in-place (asynchronous) sweeps and stopping criteria
- Visualizing value functions on a small GridWorld
- How DP policy evaluation connects to Monte Carlo and TD learning
In DP, we assume full knowledge of the MDP and use Bellman backups to compute $v^\pi$ exactly (up to numerical tolerance).
Code:
import numpy as np
import matplotlib.pyplot as plt
np.set_printoptions(precision=3, suppress=True)
1. Policy Evaluation via Bellman Expectation
For a fixed policy $ \pi $, the state-value function is
\[v^\pi(s) = \mathbb{E}_\pi \big[ G_t \mid S_t = s \big] = \mathbb{E}_\pi \big[ R_{t+1} + \gamma v^\pi(S_{t+1}) \mid S_t = s \big].\]Using the MDP model $p(s’, r \mid s,a)$ and a stochastic policy $\pi(a\mid s)$:
\[v^\pi(s) = \sum_a \pi(a \mid s) \sum_{s',r} p(s', r \mid s,a) \big( r + \gamma v^\pi(s') \big).\]In vector form:
\[v^\pi = r^\pi + \gamma P^\pi v^\pi.\]Solving exactly:
\[v^\pi = (\mathbf{I} - \gamma P^\pi)^{-1} r^\pi\]works for small MDPs.
Dynamic Programming (DP) instead applies the Bellman operator repeatedly:
which converges to $ v^\pi $ because $T^\pi$ is a $\gamma$-contraction.
We’ll implement this for a small GridWorld.
Code:
# 4x4 GridWorld like in Sutton & Barto
# States: 0..15 laid out row-major
# 0 and 15 are terminal
GRID_H, GRID_W = 4, 4
num_states = GRID_H * GRID_W
ACTIONS = ["U", "D", "L", "R"]
num_actions = len(ACTIONS)
def to_rc(s):
return divmod(s, GRID_W)
def to_s(r, c):
return r * GRID_W + c
def step_gridworld(s, a):
"""Deterministic transition for the 4x4 GridWorld."""
if s == 0 or s == num_states - 1:
# Terminal stays terminal with 0 reward
return s, 0.0, True
r, c = to_rc(s)
if a == 0: # Up
r2, c2 = max(r - 1, 0), c
elif a == 1: # Down
r2, c2 = min(r + 1, GRID_H - 1), c
elif a == 2: # Left
r2, c2 = r, max(c - 1, 0)
elif a == 3: # Right
r2, c2 = r, min(c + 1, GRID_W - 1)
else:
raise ValueError("invalid action index")
s2 = to_s(r2, c2)
# Reward: -1 per step until terminal, 0 at terminal
done = (s2 == 0 or s2 == num_states - 1)
rwd = 0.0 if done else -1.0
return s2, rwd, done
# Build full transition model: P[s, a] → list of (p, s', r, done)
P_env = {}
for s in range(num_states):
for a in range(num_actions):
s2, r, done = step_gridworld(s, a)
P_env[(s, a)] = [(1.0, s2, r, done)]
print("Example transitions from state 5:")
for a_idx, a_name in enumerate(ACTIONS):
print(f" action {a_name}: {P_env[(5, a_idx)]}")
Output:
Example transitions from state 5:
action U: [(1.0, 1, -1.0, False)]
action D: [(1.0, 9, -1.0, False)]
action L: [(1.0, 4, -1.0, False)]
action R: [(1.0, 6, -1.0, False)]
2. A Simple Policy on GridWorld
We’ll evaluate a uniform random policy:
\[\pi(a \mid s) = \begin{cases} \frac{1}{4} & \text{if } s \text{ is non-terminal and } a \in \{\text{U,D,L,R}\} \\ 1 & \text{if } s \text{ is terminal and } a = \text{(noop)} \\ \end{cases}\]In code, we simply choose each action with probability $1/4$ in non-terminal states.
Code:
gamma = 1.0 # standard setting for this GridWorld
def is_terminal(s):
return s == 0 or s == num_states - 1
def uniform_policy(s):
"""Returns π(a|s) as an array of length num_actions."""
if is_terminal(s):
# Any action is irrelevant; value is 0 and staying put.
return np.ones(num_actions) / num_actions
return np.ones(num_actions) / num_actions
def bellman_expectation_backup(v, policy, gamma):
"""Apply the Bellman expectation update for all states under given policy."""
v_new = np.zeros_like(v)
for s in range(num_states):
if is_terminal(s):
v_new[s] = 0.0
continue
val = 0.0
pi_s = policy(s)
for a in range(num_actions):
pi_sa = pi_s[a]
for p, s2, r, done in P_env[(s, a)]:
val += pi_sa * p * (r + gamma * v[s2])
v_new[s] = val
return v_new
def iterative_policy_evaluation(policy, gamma=1.0, theta=1e-4, max_iters=1000, inplace=False):
"""
Evaluate a policy via iterative policy evaluation.
- inplace=False: synchronous updates (v_{k+1} from v_k)
- inplace=True: in-place updates (Gauss–Seidel style sweep)
"""
v = np.zeros(num_states)
history = [v.copy()]
for it in range(max_iters):
delta = 0.0
if not inplace:
# synchronous: compute v_new from old v
v_new = bellman_expectation_backup(v, policy, gamma)
delta = np.max(np.abs(v_new - v))
v = v_new
else:
# in-place: update v[s] directly as we sweep
for s in range(num_states):
if is_terminal(s):
continue
old_vs = v[s]
val = 0.0
pi_s = policy(s)
for a in range(num_actions):
pi_sa = pi_s[a]
for p, s2, r, done in P_env[(s, a)]:
val += pi_sa * p * (r + gamma * v[s2])
v[s] = val
delta = max(delta, abs(old_vs - v[s]))
history.append(v.copy())
if delta < theta:
break
return np.array(history)
v_hist_sync = iterative_policy_evaluation(uniform_policy, gamma=gamma, theta=1e-4, inplace=False)
v_hist_inpl = iterative_policy_evaluation(uniform_policy, gamma=gamma, theta=1e-4, inplace=True)
print("Synchronous iterations:", len(v_hist_sync) - 1)
print("In-place iterations :", len(v_hist_inpl) - 1)
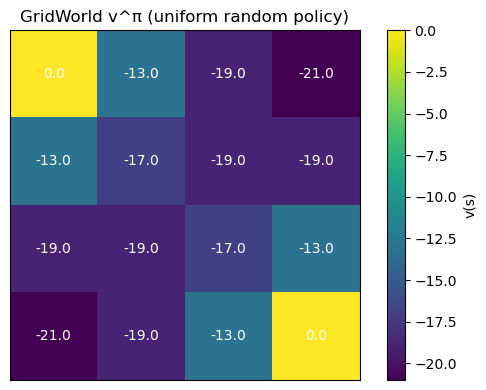
print("Final v (sync):", np.round(v_hist_sync[-1], 3))
Output:
Synchronous iterations: 172
In-place iterations : 114
Final v (sync): [ 0. -12.999 -18.998 -20.998 -12.999 -16.999 -18.998 -18.998 -18.998
-18.998 -16.999 -12.999 -20.998 -18.998 -12.999 0. ]
Code:
def plot_grid_values(v, title="State values"):
grid = v.reshape(GRID_H, GRID_W)
plt.figure(figsize=(6,4))
plt.imshow(grid, cmap="viridis")
for r in range(GRID_H):
for c in range(GRID_W):
plt.text(c, r, f"{grid[r, c]:.1f}",
ha="center", va="center", color="white", fontsize=10)
plt.xticks([]); plt.yticks([])
plt.title(title)
plt.colorbar(label="v(s)")
plt.tight_layout()
plt.show()
plot_grid_values(v_hist_sync[-1], title="GridWorld v^π (uniform random policy)")
Code:
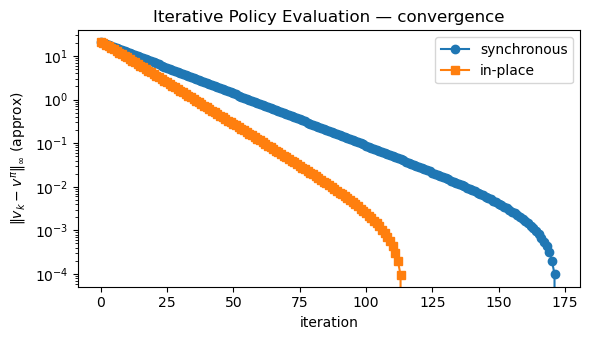
# Compare convergence: synchronous vs in-place (Gauss–Seidel)
sync_diff = np.linalg.norm(v_hist_sync - v_hist_sync[-1], ord=np.inf, axis=1)
inpl_diff = np.linalg.norm(v_hist_inpl - v_hist_inpl[-1], ord=np.inf, axis=1)
plt.figure(figsize=(6,3.5))
plt.plot(sync_diff, marker="o", label="synchronous")
plt.plot(inpl_diff, marker="s", label="in-place")
plt.yscale("log")
plt.xlabel("iteration")
plt.ylabel(r"$\|v_k - v^\pi\|_\infty$ (approx)")
plt.title("Iterative Policy Evaluation — convergence")
plt.legend()
plt.tight_layout()
plt.show()
3. DP vs Monte Carlo vs Temporal-Difference
Dynamic Programming (DP) policy evaluation:
\[v_{k+1}(s) = \sum_a \pi(a \mid s) \sum_{s',r} p(s',r \mid s,a) \big( r + \gamma v_k(s') \big)\]uses the full model $p(s’,r \mid s,a)$ to update all states in sweeps.
Other families:
-
Monte Carlo (MC): estimate $ v^\pi(s) $ from sampled returns:
\[v(s) \approx \frac{1}{N} \sum_{i=1}^N G^{(i)} \quad \text{from episodes starting in } s.\]No need for $p(\cdot)$, but must wait for episode termination.
-
Temporal-Difference (TD): bootstrap using a sampled next state:
\[v(S_t) \leftarrow v(S_t) + \alpha \big( R_{t+1} + \gamma v(S_{t+1}) - v(S_t) \big).\]Uses incomplete returns and learns online.
Big picture
- DP: model-based, full sweeps, exact Bellman backups.
- MC: model-free, full returns, high variance, but unbiased.
- TD: model-free, bootstrapping, lower variance, bias–variance trade-off.
In all cases, the target is the same Bellman expectation equation for $v^\pi$ — only the way we approximate it differs.
Key Takeaways
-
Policy evaluation computes $ v^\pi $ for a fixed policy using the Bellman expectation equation:
\[v^\pi(s) = \sum_a \pi(a \mid s) \sum_{s',r} p(s',r \mid s,a)\, \big( r + \gamma v^\pi(s') \big).\] - Iterative policy evaluation (DP) repeatedly applies the Bellman operator across all states until the values converge within a tolerance.
- Synchronous and in-place (Gauss–Seidel) sweeps both converge; in-place updates often converge faster in practice.
- Visualizing $v^\pi$ on GridWorld makes it clear how values encode “distance-to-goal” under a policy.
- Monte Carlo and TD methods approximate the same fixed point as DP, but without requiring access to the full MDP model.
Next: 14_dp_policy_iteration.ipynb → use policy evaluation + greedy improvement to iteratively refine policies toward optimal control.